We have just started a challenge in PLTW POE, which is the golf ball challenge. The goal is to build a Lego NXT robot that will pick up, drive with, and deliver a golf ball. The robot must first pick up a golf ball that is sitting on a brick. The robot must then navigate around or under a ramp (If it is short enough) and then roll the golf ball on and off of a brick into a container. Your goal is to complete the challenge as fast as possible.
What makes the challenge difficult is that you can't control the robot, you have to code it to do the work beforehand. You also can only have up to 3 motors: most likely 2 for driving, and 1 for grabbing the golf ball. That means no sensors.
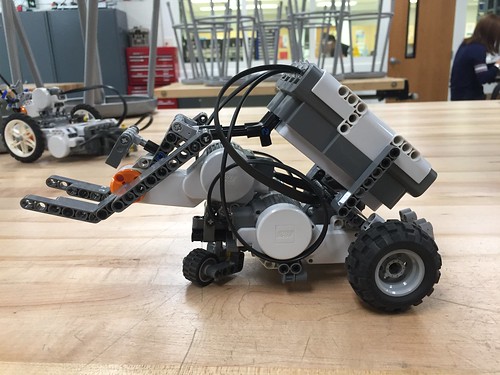
Our (My and Ethan's) robot is based on the official NXT robot design, however we have modified it to hold a third motor and the rear wheel has been strengthened. We decided to put the claw to hold the ball in the rear, because we could fit the third motor under the NXT brick where it could be attached securely. It also allowed us to have the robot move forwards for the majority of the challenge instead of in reverse, and it moves straighter when it moves forwards becuase there is only one rear wheel.
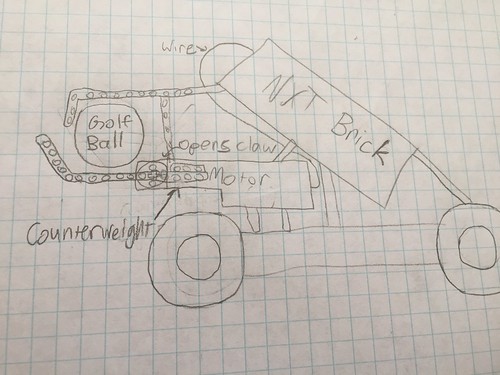
Here is our initial plan of our design:
And here is what we built based on the plan: