For the second PLTW Lego NXT challenge our goal was to make a functional winch that can rotate. We have to pick up a weight with our crane, rotate, and drop it on top of a block on the table near where our robot will be sitting. The educational goal of this project was to learn how to calculate and apply gear ratios into our creation and manage weight (so it doesn't tip over).
I'm working with Ethan again, and he has done some calculations to determine a range fo gear ratios that would give enough torque to lift a 500 gram weight. We are allowed to choose how much we lift, and that is what we settled on. Ethan found that a gear ratio between 0.790 and 1.038 would give us a good amount of torque to lift the weight but while still staying at a decent speed. We have not tested this out yet so when we do I will share the results.
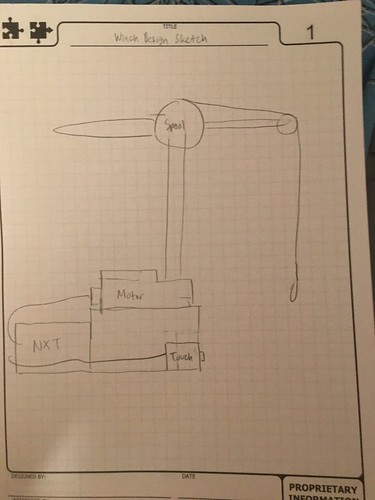
Ethan sketched out a simple plan for our robot, you can see it here:
We have already built the main base for the robot, and here it is rotating:
Later on we added the gears and motor, and attached the winch itself, here it is:

The middle gear is not attatched very well, so Ehan and I will be finding a way to attach that with another method. We also may add a second motor right next to the first one for extra torque, but we would need to rethink our approach with the gears, so we may or may not do that.